阿里云PAI為您提供了部分典型場景下的示例模型,便于您便捷地接入TorchAcc進行訓練加速。本文為您介紹如何在ResNet-50分布式訓練中接入TorchAcc并實現訓練加速。
測試環境配置
測試環境配置方法,請參見配置測試環境。
本案例以DSW環境V100M16卡型為例,例如:節點規格選擇ecs.gn6v-c8g1.16xlarge-64c256gNVIDIA V100 * 8。
接入TorchAcc加速ResNet-50分布式訓練
以DSW環境為例:
進入DSW實例頁面下載并解壓測試代碼及腳本文件。
在交互式建模(DSW)頁面,單擊DSW實例操作列下的打開。
在Notebook頁簽的Launcher頁面,單擊快速開始區域Notebook下的Python3。
執行以下命令下載并解壓測試代碼及腳本文件。
!wget http://odps-release.cn-hangzhou.oss.aliyun-inc.com/torchacc/accbench/gallery/resnet50.tar.gz && tar -zxvf resnet50.tar.gz
進入
ResNet-50目錄,雙擊打開resnet50.ipynb文件。后續,您可以直接在該文件中運行下述步驟中的命令,當成功運行結束一個步驟命令后,再順次運行下個步驟的命令。
執行以下命令下載測試數據集(默認使用類似imagenet-1k的mock數據集)并安裝ResNet-50模型依賴的第三方包。
!bash prepare.sh分別使用普通訓練方法(baseline)和接入TorchAcc進行ResNet-50模型分布式訓練,來驗證TorchAcc的性能提升效果。
說明在測試不同GPU卡型(例如V100、A10等)時,可以通過調整batch_size來適配不同卡型的顯存大小。
在測試不同機器實例時,由于單機GPU卡數不同(假設為N),因此可以通過設置nproc_per_node來啟動單卡或多卡的任務,其中:1<=nproc_per_node<=N。
Pytorch Eager單卡(baseline訓練)
!#!/bin/bash !set -ex !python launch_single_task.py --nproc_per_node=1 --amp_level=O1 --batch_size=128Pytorch Eager八卡(baseline訓練)
!#!/bin/bash !set -ex !python launch_single_task.py --nproc_per_node=8 --amp_level=O1 --batch_size=128TorchAcc單卡(PAI-OPT)
!#!/bin/bash !set -ex !python launch_single_task.py --nproc_per_node=1 --amp_level=O1 --compiler-opt --batch_size=128TorchAcc八卡(PAI-OPT)
!#!/bin/bash !set -ex !python launch_single_task.py --nproc_per_node=8 --amp_level=O1 --compiler-opt --batch_size=128
其中:普通訓練方法和接入TorchAcc訓練方法的優化配置如下:
baseline:Torch112+DDP+AMPO1
PAI-Opt:Torch112+TorchAcc+AMPO1
執行以下命令,獲取性能結果數據。
import os from plot import plot, traverse from parser import parse_file #import seaborn as sns if __name__ == '__main__': path = "output" file_names = {} traverse(path, file_names) for model, tags in file_names.items(): for tag, suffixes in tags.items(): title = model + "_" + tag label = [] api_data = [] for suffix, o_suffixes in suffixes.items(): label.append(suffix) for output_suffix, node_ranks in o_suffixes.items(): assert "0" in node_ranks assert "log" in node_ranks["0"] parse_data = parse_file(node_ranks["0"]["log"]) api_data.append(parse_data) plot(title, label, api_data)生成如下圖所示結果。
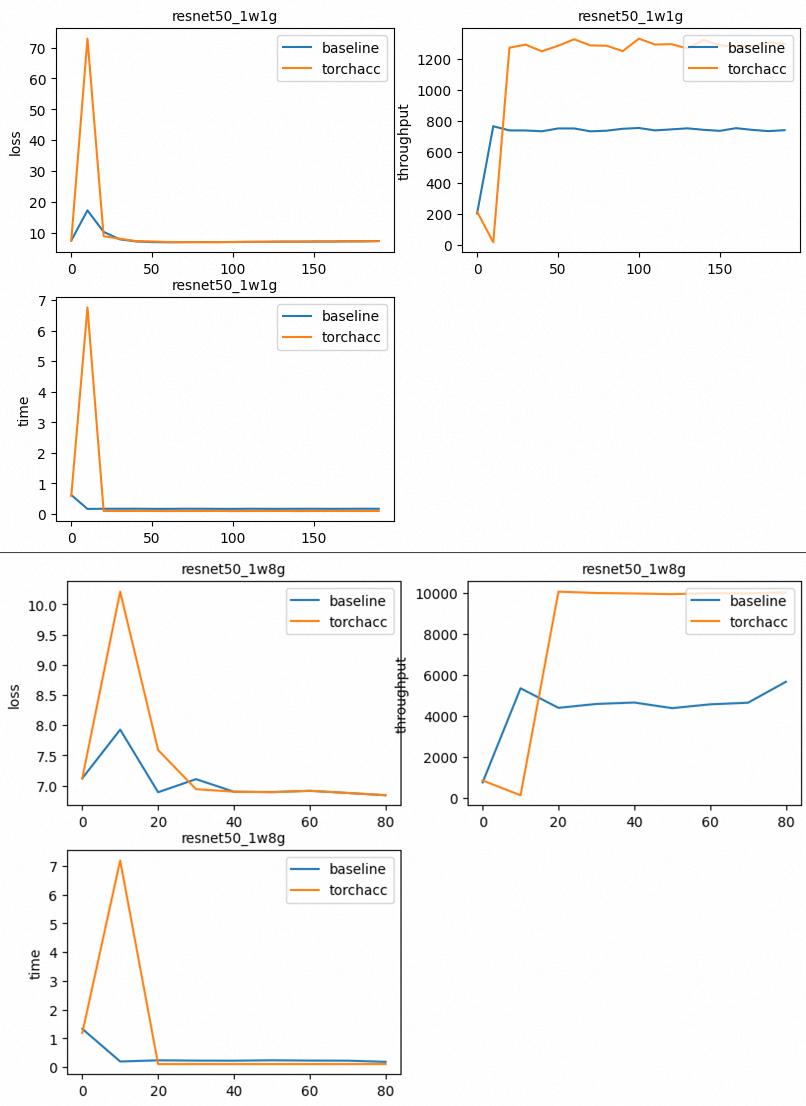
實驗結果表明,使用TorchAcc進行ResNet-50分布式訓練可以明顯提升性能。關于接入TorchAcc更詳細的代碼實現原理,請參見代碼實現原理。
代碼實現原理
將上述的ResNet-50模型接入TorchAcc框架進行分布式訓練加速的代碼配置,請參考已下載的代碼文件ResNet-50/main.py。
Import TorchAcc API
在main函數import處添加以下代碼,請參考main.py文件中76-80行代碼:
from logger import create_logger, enable_torchacc_compiler, enable_torchacc_kernel, log_params, log_metrics
if enable_torchacc_compiler():
import torchacc.torch_xla.core.xla_model as xm
import torchacc.torch_xla.distributed.xla_backend
from torchacc.torch_xla.amp import autocast, GradScaler
from torchacc.torch_xla.amp import syncfree
dist.get_rank = xm.get_ordinal
dist.get_world_size = xm.xrt_world_size
else:
from torch.cuda.amp import autocast, GradScaler分布式初始化
在調用dist.init_process_group函數時,將backend參數設置為xla:
dist.init_process_group(backend="xla", init_method="env://")set_replication+封裝dataloader+model placement+optimizer
在模型和dataloader定義完成之后,獲取xla_device并調用set_replication函數,以封裝dataloader并設置模型的設備位置。請參考main.py文件中97-107、124-130、136-140行代碼。
+if enable_torchacc_compiler():
+ dist.init_process_group(backend="xla", init_method="env://")
+ device = xm.xla_device()
+ xm.set_replication(device, [device])
+else:
args.local_rank = int(os.environ["LOCAL_RANK"])
device = torch.device(f"cuda:{args.local_rank}")
dist.init_process_group(backend="nccl", init_method="env://")
dist.barrier()
args.world_size = dist.get_world_size()
args.rank = dist.get_rank()
+if enable_torchacc_compiler():
+ model.to(device)
+ xm.mark_step()
+else:
torch.cuda.set_device(device)
model.cuda(device)
model = torch.nn.parallel.DistributedDataParallel(model)
+if enable_torchacc_compiler() and args.amp_level != "O0":
+ optimizer_cls = syncfree.AdamW
+else:
optimizer_cls = torch.optim.AdamW
optimizer = optimizer_cls(model.parameters(), args.lr,
weight_decay=args.weight_decay)梯度allreduce通信
如果啟用了AMP開關,需要在loss backward后對梯度進行allreduce,并在backward和apply計算階段修改代碼。具體請參考main.py文件的240-277行代碼。
for step, (images, target) in enumerate(train_loader):
if step > args.max_steps:
break
+ if not enable_torchacc_compiler():
+ images = images.to(device, non_blocking=True)
+ target = target.to(device, non_blocking=True)
# compute output
with autocast_context_manager(args):
output = model(images)
loss = criterion(output, target)
# measure accuracy and record loss
acc1, acc5 = accuracy(output, target, topk=(1, 5))
# compute gradient and do optimizer step
optimizer.zero_grad()
if args.amp_level != "O0":
scaler.scale(loss).backward()
+ if enable_torchacc_compiler():
+ gradients = xm._fetch_gradients(optimizer)
+ xm.all_reduce('sum', gradients, scale=1.0/dist.get_world_size())
scaler.step(optimizer)
scaler.update()
else:
loss.backward()
+ if enable_torchacc_compiler():
+ gradients = xm._fetch_gradients(optimizer)
+ xm.all_reduce('sum', gradients, scale=1.0/xm.xrt_world_size())
optimizer.step()
if args.rank == 0 and step % args.log_interval == 0:
# measure elapsed time
batch_time = (time.time() - end) / args.log_interval
end = time.time()
samples_per_step = float(args.batch_size / batch_time) * args.world_size
peak_mem = torch.cuda.memory_stats()['allocated_bytes.all.peak']/1024.0/1024.0/1024.0
log_metrics(epoch, step, args.batch_size, loss, batch_time, samples_per_step, peak_mem)Training Loop封裝
更新代碼邏輯:
從dataloader取出樣本(數據)作為后面訓練的輸入,具體請參考main.py文件的243-245行代碼:
+if not enable_torchacc_compiler(): images = images.to(device, non_blocking=True) target = target.to(device, non_blocking=True)如果啟用了AMP功能,目前TorchAcc只支持使用AMP的autocast功能。因此需要在training loop中添加
get_autocast_and_scaler代碼,具體請參考main.py文件的248-250行代碼。with autocast_context_manager(args): output = model(images) loss = criterion(output, target)其中
autocast_context_manager函數的實現可以參考main.py文件的87-92行代碼。def autocast_context_manager(args): if args.amp_level != "O0": ctx_manager = autocast() else: ctx_manager = contextlib.nullcontext() if sys.version_info >= (3, 7) else contextlib.suppress() return ctx_manager
、